
创造的词汇。在当今,机器人是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。它的任务是协助或取代人类工作的工作,例如生产业、建筑业,或是的工作。
它是高级整合控制论、机械电子、计算机、材料和仿生学的产物。在工业、医学、农业、建筑业甚至军事等领域中均有重要用途。
国际上对机器人的概念已经逐渐趋近一致。一般来说,人们都可以接受这种说法,即机器人是靠自身动力和控制能力来实现各种功能的一种机器。联合国标准化组织采纳了美国机器人协会给机器人下的定义:“一种可编程和多功能的操作机;或是为了执行不同的任务而具有可用电脑改变和可编程动作的专门系统。”它能为人类带来许多方便之处!
机器人,我们可以这么理解:一个轴的运动会改变另一个轴的坐标原点,比如六关节机器人。机器人研究得较为成熟,具有结构简单,成本低,控制简单,运动空间大等优点,已成功应用于很多领域,如各种机床,装配车间等。许多工业机器人都是机器人。
与传统工业机器人相比,后三个旋转关节轴线相交于一点、而前三个旋转关节轴线均不相交的六度机器人的工作空间较为完善,然而此类6R机器人逆解的求解较为复杂,了其应用。
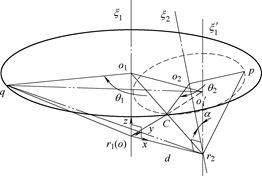
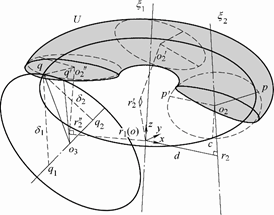
中国科学院的孙恒辉、赵爱武、李达等近期发表了一篇《基于新旋量子问题改进一类6R机器人逆解算法》,针对其逆解问题,提出一类新的Paden-Kahan子问题类型:将一点绕两个不相交且不平行的轴线依次旋转到指定点,以及其扩展问题类型:将一点绕两个不相交且不平行的轴线依次旋转直到该点到固定第一点和固定第二点的距离均为指定大小。通过构造与该点运动轨迹相垂直的垂直平面,推导和求解了该子问题的正解和逆解,结合其他已知的子问题,简化和求解此类6R机器人的逆解问题,并对其逆解的条件和数目进行讨论。与传统的消元法相比,他们所采用该方法得到的逆解的几何意义更为明确、计算量少、求解效率更高,改进了此类6R机器人逆解算法。通过实例计算,他们成功验证了求解方法的有效性和可行性。
并联机器人,一个轴运动而不影响另一个轴的坐标原点,比如tripod蜘蛛机器人。而并联机构,我们可以定义为动平台和定平台通过至少两个的运动链相连接,机构具有两个或两个以上度,且以并联方式驱动的一种闭环机构。如果说,机器人就像人的一个手拿东西,而并联机器人就相当于两个手一起端东西。并联机构学作为复杂机构,在实际应用中十分重要。
1978年,Hunt首次提出把六度并联机构作为机器人操作器,由此拉开并联机器人研究的序幕,但在随后的近10年里,并联机器人研究似乎停滞不前。直到80年代末90年代初,并联机器人才引起了广泛注意,成为国际研究的热点。
国内并联机构学的研究是从20世纪80年代初期开始发展的。燕山大学的黄真教授在1991年研制出我国第一台六度并联机器机,在1994年研制出一台柔性铰链并联式六度机器人误差补偿器,在1997年出版了我国第一部关于并联机器人理论及技术的专著,2006年又出版了《高等空间机构学》。当年的黄真教授从美国留学归国后,在燕山大学建立了国内最早的并联机构学科研团队,如今国内许多并联机构学的科研先锋和知名学者都出自这个团队。
我们再来看看关于并联机器人的那些事儿。并联机器人和传统工业用机器人在哲学上呈对立统一的关系,和机器人相比较,并联机器人具有以下特点:
根据这些特点,并联机器人在需要高刚度、高精度或者大载荷而无须很大工作空间的领域内得到了广泛应用
而雅可比矩阵对并联机器人的速度、精度、刚度等性能分析有着非常重要的意义。通常雅可比分析需要计算与驱动关节运动螺旋不互易而与支链其他运动螺旋均互易的力螺旋,分析过程复杂,计算量大。
为此,同济大学的卜王辉、郑钰馨、张攀等发表了《含正则支链的并联机器人雅可比简化分析方法》一文。他们针对一类常见的特殊支链结构,提出正则支链的概念,研究了正则支链的结构特征。他们的团队分析了转动副和移动副的驱动力螺旋,提出含正则支链的并联机器人雅可比简化分析方法,克服了现有方法中计算驱动关节产生的支链约束螺旋的复杂过程。这种方法不必计算支链约束螺旋就能获得并联机器人的部分雅可比矩阵,进而结合支链约束螺旋获得并联机器人的整体雅可比矩阵,实现驱动关节与动平台之间运动和力的双向映射。该团队所提的方法不仅适用于常见的6度并联机器人,也适用于具有正则支链的少度并联机器人。
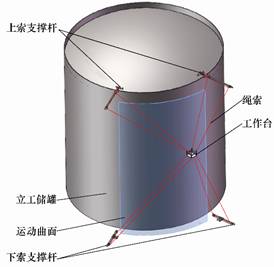
我们再来看看并联机构在日常工程中的应用情况。在我们所熟悉石油化工行业中,大型立式储罐往往多个集中放置,存储液体易燃易爆、有毒,一旦发生事故,将造成巨大的经济损失及灾难性后果。目前,面对大型立式储罐的检修任务,传统的脚手架、导轨及爬壁机器人等工作平台存在拆装困难、结构复杂或运行速度较低等缺点,有效载荷能力和工作效率受。而索并联机构具有工作空间大、承载能力强、模块化等优点,在大型立式储罐的检修领域极具应用潜力。
大学的王伟方、唐晓强、邵珠峰在《八索立式储罐并联机器人设计及性能优化》一文中提出了提出索牵引并联机器人作为大型立式储罐的检修工作平台,这是一种采用四根支撑杆的八索驱动并联机器人工作平台,而还具备出索点可调的模块化支撑杆设计;他们还建立了索并联机构的运动学模型和平面简化模型,分析机构参数对其工作空间的影响,并针对20 m口径典型立式储罐给出了优化结构参数;结合索牵引并联机器人的工作平台沿不同轨迹运动时索长、索力变化分析,确定了运动规划时优选运动轨迹。该团队后续将根据本文优化设计结果搭建实物缩尺研究模型,进一步研究该类机构的动力学、控制性能等方面的研究。

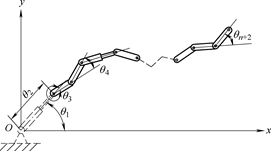
现在,我们再来看看对于多关节仿生机器人的一些研究。冗余多刚体机器人具有良好的避障性能及自运动能力,近年来针对其结构特性,在逆运动学求解、自运动及容错性等关键问题上取得了一定研究。然而典型欠驱动冗余多刚体系统如欠驱动蛇形机器人,存在被动关节,而且属于无根多刚体系统。无根多刚体系统由于没有与已知运动规律的刚体相连(称为零刚体),位形空间方程不能实现其运动控制要求,需要基于速度约束或者加速度约束实现控制,其本质上亦属于非完整系统。
因此针对此类无根欠驱动冗余度机器人系统可基于动力学控制模型进行可控性讨论,在此基础上对其动力耦合特性的研究对多关节仿生机器人的广泛应用有重要意义,同时也为此类机器人的控制研究奠定基础。
事实上,无根多刚体系统和欠驱动冗余机器人系统实质上都属二阶非完整动力系统,其位姿空间约束方程不能满足控制要求,一般基于动力学方程对系统进行控制,即通过关节间动力耦合作用约束被动关节运动,因此此类机器人可控性分析的重点在于系统耦合运动特性研究。
农业大学的李娜、燕山大学的赵铁石、和农业大学的姜海勇等在《无根欠驱动冗余机器人动力耦合特性研究》一文中基于动力学虚设机构法及非完整系统微分变分原理,建立了无根欠驱动冗余机器人的动力学模型;针对虚设关节、主、被动关节进行动力学模型解耦,推导出了系统的二阶非完整约束方程及被动关节的加速度表达式;在此基础上,通过定义表征被动关节耦合运动的性能指标,针对不同主动关节输入参数对被动关节可控性的影响进行了仿真分析,得到了提高无根欠驱动冗余机器人可控性的有益结论,为实际欠驱动冗余机器人输入控制提供了参考。
还有许多有趣的工业机器人,等待我们去认知。管道是石油、天然气、工厂、城市供水系统的主要运输工具。随着使用年限的增加,管道容易出现腐蚀、老化、裂缝等故障。近年来,管道事故频发,造成了巨大的经济损失和。国内外学者开发了各种各样的管内机器人应用于管道的缺陷检测和故障。相比于传统的人工检测方式,机器人检测具有安全、效率高、成本低等优点。根据移动机构的不同,目前管内机器人主要可以分为9类:pig式、内窥镜式、直接驱动轮式、螺旋驱动式、履带式、腿式、尺蠖式、弹力支撑式和仿蛇式。
在管内机器人的众多移动机构中,螺旋驱动方式具有易于微型化和能耗低的优点,在小管径管道中具有很大应用潜力。
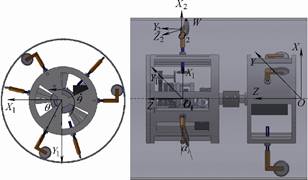
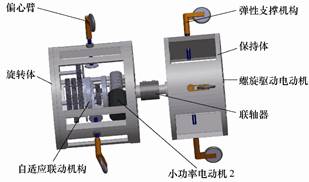
中国科学院的李特、马书根、等发表了《螺旋驱动管内机器人自适应运动机理与机构设计》一文,他们的研究是为了提高螺旋驱动式管内机器人在直管道和不同曲率半径弯管道中的适应能力,对自适应运动机理这一问题展开研究。考虑管道特点,在机器人运动学和力学建模的基础上,该探究团队分别提出了直行运动机理、转向运动机理和负载能力调节机理。调节螺旋轮倾角能够使螺旋驱动式管内机器人具有自适应性,并能够避免运动和滚轮打滑的问题。基于自适应运动机理,提出一种基于自适应联动机构的螺旋驱动式管内机器人。自适应联动机构通过偏心臂反馈信息,并利用差动原理改变螺旋轮倾角。动力学仿真结果表明:该机器人能够机械自适应地通过直管和不同曲率半径的弯管,同时能够通过自适应联动机构调节负载能力。
目前,机器人也逐渐被应用于搜救、战场侦察、野外勘测等复杂未知中。接下来,我们再来看看在探测救援工作中的移动机器人的研究情况。活动灵巧、适应能力强的多足机器人越来越受到国内外学者的关注。
的甄伟鲲、康熙、张新生、戴建生在《一种新型四足变胞爬行机器人的步态规划研究》一文中,详细介绍了一种腰部可以活动的四足机器人的设计及其步态生成,并展示了活动腰部可提升机器人对极端的适应性。他们提出了三个基本假设,以简化机构模型,并提出了腰部构态变换规则,并用几何方法说明了腰部构型变化可扩大机器人腿部活动空间,从而提升对复杂的适应性。另外,腰部运动与步态融合,生成了两种新的基本步态——扭腰直行步态和原地旋转步态。基于提出的两种步态,该团队还对比了固定腰部与可动腰部条件下运动稳定裕度的变化,分别计算了狭窄弯道通过条件,并分析了所设计步态对头部视觉的影响,从而证明所设计机器人具有较高的极端适应能力。

在许多情况下,采用单一运动方式难以满足机器人在各种复杂未知的运动需求。许多复合移动机器人的越障能力比较有限,难以克服大于自身尺寸的障碍物。弹跳机器人可跳跃数倍于自身尺寸的高度。弹跳运动有多种动力源,利用电能使弹性元件蓄能已被广泛采用。
南京航空航天大学的左方睿、王化明、栾云广等发表了《燃气动力弹跳机器人的设计与试验研究》一文,他们以可燃混合气体为动力源,设计了一种燃气动力的弹跳机器人,包括弹跳驱动器和轮式运动机构。弹跳驱动器采用双活塞燃烧室结构及磁力锁紧机构,有效减小驱动器体积,有利于驱动器复位和废气排除。轮式运动机构包括车身和蜂窝车轮,车身作为驱动器载体,蜂窝车轮用于机器人落地缓冲。该团队对车轮的径向、周向和切变模量进行了等效计算,并采用铁木辛柯梁理论对车轮进行静力分析,计算结果与试验数据吻合;利用LS-DYNA对车轮落地碰撞进行仿真,分析了落地冲击能量消耗。他们还对机器人的弹跳运动进行规划,弹跳越障试验表明机器人可直接越过或跃上障碍物,验证了机器人的弹跳运动能力。该弹跳机器人的研究为提高地面移动机器人的未知复杂地形适应能力提供了一种可行的技术方案。
对以上内容感兴趣的朋友不要着急,小编已为大家整理OK以上几篇在《机械工程学报》出版的关于机器人专题的文章,大家可以再我们的微信平台回复“20170515”免费下载全文阅读!拿走不谢!
感谢您对《机械工程学报》编辑部的热心关注!更希望您能参与我们的合作,让我们携手助力优秀科研的,向大机械领域的朋友们展示最新高水平的科研。
每年的5月15日是“全国碘缺乏病宣传日”,也被称作“全国碘缺乏病防治日”。是为了提高国民对“碘缺乏病”危害的认识,促进国民身体健康而设立。
推荐:


网友评论 ()条 查看